Цифровой тиристорный преобразователь ELL 4003

Цифровой тиристорный преобразователь ELL 4003 предназначен для прецизионного управления скорости и позиции двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи. Их управление реализовано современным DSP процессорами и обеспечивает приводу разнообразные функциональные возможности, высокую надёжность и стабильность эксплуатационных характеристик.
Номинальный ток якоря, А | 30 |
Максимальный ток якоря, А | 60 |
Напряжение силового питания, В | 3х380 |
Частота силового напряжения питания, Гц | 45-65 |
Максимальное напряжение якоря, В | 440 |
Диапазоны номинального тока возбуждения, А2 | 20.0 / 10.0 / 6.51 |
Максимальное напряжение возбуждения, В (DC) | 320 (при UF = 380В AC) |
Датчик обратной связи по скорости | Тахогенератор / Энкодер / ЭДС |
Максимальное напряжение тахогенератора, В | ± 193 при NMAX |
Датчик обратной связи по позиции | Энкодер |
Задание для скорости | Аналоговое задание, параллельный код – до 14 bit, серийный интерфейс |
Аналоговое задание для скорости, В | ± 10 / от 0 до 10 / от 0 до -10 |
Задание для позиции | Внутреннее цифровое задание / серийный интерфейс |
Диапазон регулирования скорости | 1:10000 |
Аналоговые выходы 3 | 2 выхода, ± 10 В, 2 мА |
Цифровые входы | 18 входов, ± 24 В, 10 мА |
Цифровые выходы | 5 выходов релейного типа, 100 В (AC) / 0,3 А 24 В (DC) / 0.3А |
Серийные интерфейсы4 | RS 232C до 9600 бит/сек RS 422 / RS 485 до 115 200 бит/сек |
Режим работы | Продолжительный S1 |
Степень защиты | IP20 |
Температура окружающей среды, C° | 0-50 |
Масса, кг | 9,1 |
Конструктивное исполнение
По своему предназначению тиристорные преобразователи ELL 4003 универсальные и одновременно с этим их функциональные возможности и гибкий интерфейс позволяют применять их в главных приводах станков с ЧПУ.
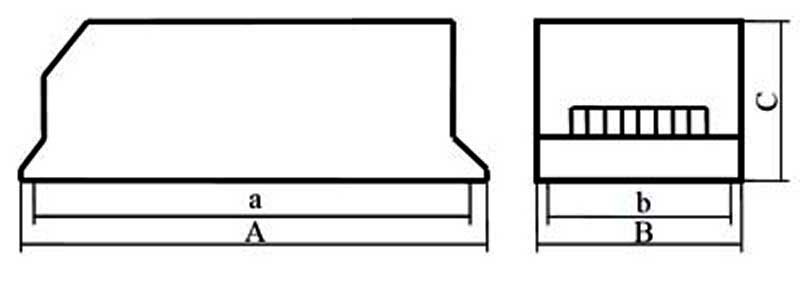
Схема - габаритные размеры преобразователя
A, мм | 405 |
B, мм | 200 |
C, мм | 170 |
a, мм | 390 |
b, мм | 180 |
Основные функциональные возможности преобразователей ELL 4003:
- прецизионное четыре квадрантное управление двигателей постоянного тока с независимым возбуждением для главных приводов и приводов подачи;
- цифровой адаптивный PID регулятор скорости с адаптацией в функции от действительной скорости или в функции от ошибки скорости;
- возможность для гибкой настройки параметров адаптивного регулятора скорости, включая и пороги их действия;
- работа двигателя в до трех зонах:
- первая зона – работа с постоянным крутящим моментом;
- вторая зона – работа с постоянной мощностью;
- третья зона – работа с уменьшением мощности.
- возможность для работы только в первой зоне без ослабления поля;
- цифровой регулятор тока якоря;
- цифровой регулятор ЭДС;
- цифровой регулятор тока возбуждения;
- цифровой регулятор позиции;
- динамический диапазон регулирования скорости – выше 1:10000;
- обратная связь по скорости от тахогенератора, энкодера или от ЭДС якоря;
- автоматическое определение сопротивления цепи якоря;
- автоматическое определение очередности следования фаз сети питания и возможность для работы при «левом» и «правом» вращении фаз;
- возможность переключения до четырех максимальных скоростей при работе со станками имеющими коробку передач и смена коэффициента передачи между энкодером и двигателем;
- задание для скорости с параллельным 10-битовым кодом при работе с коробкой передачи с переключением коэффициента передачи;
- ограничение момента на двух уровнях TLL и TLH;
- универсальные цифровые входы для работы с сигналами с положительной или отрицательной полярностью;
- возможность для наблюдения основных переменных электропривода;
- введение и измерение переменных тока, напряжения и частоты электропривода в естественных единицах – амперы, вольты и герцы;
- настройка параметров с компьютерной программой ELL RS232 V2.0 под ОС WINDOWS;







